




אולטרא הויך פּרעציזיע MZM מאָדולאַטאָר בייאַס קאָנטראָללער אויטאָמאַטיש בייאַס קאָנטראָללער


אייגנשאַפט
• בייאַס וואָולטידזש קאָנטראָל אויף שפּיץ/נול/Q+/Q−
• בייאַס וואָולטידזש קאָנטראָל אויף אַרביטראַריש פּונקט
• אולטרא פּינקטלעכע קאָנטראָל: 50dB מאַקסימום עקסטינדזשמענט פאַרהעלטעניש אויף נול מאָדע;
±0.5◦ גענויקייט אויף Q+ און Q− מאָדעס
• נידעריקע דיטער אַמפּליטוד:
0.1% Vπ ביי נול מאָדע און שפּיץ מאָדע
2% Vπ ביי Q+ מאָדע און Q− מאָדע
• הויכע סטאַביליטעט: מיט גאָר דיגיטאַלער אימפּלעמענטאַציע
• נידעריק פּראָפיל: 40 מם (ברייט) × 30 מם (ט) × 10 מם (ה)
• גרינג צו ניצן: מאַנועלע אָפּעראַציע מיט מיני דזשאַמפּער;
פלעקסיבלע OEM אָפּעראַציעס דורך MCU UART2
• צוויי פֿאַרשידענע מאָדעס צו צושטעלן בייאַס וואָולטידזש: a. אויטאָמאַטישע בייאַס קאָנטראָל
ב. באַניצער-דעפינירט בייאַס וואָולטידזש

אַפּליקאַציע
• LiNbO3 און אנדערע MZ מאָדולאַטאָרן
• דיגיטאַל NRZ, RZ
• פּולס אַפּליקאַציעס
• ברילאָואַן צעשפּרייטונג סיסטעם און אַנדערע אָפּטישע סענסאָרן
• CATV טראַנסמיטער
פאָרשטעלונג
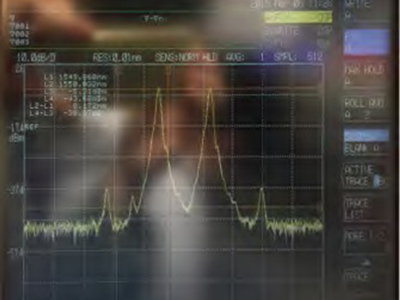
פיגור 1. טרעגער סאַפּרעסיע
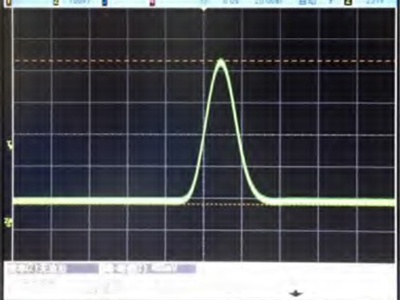
פיגור 2. פּולס דזשענעריישאַן

פיגור 3. מאָדולאַטאָר מאַקסימום מאַכט
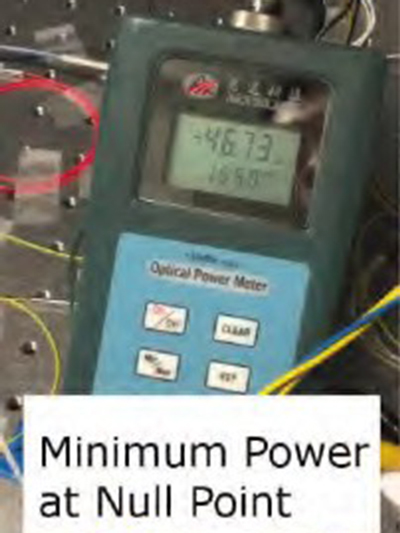
פיגור 4. מאָדולאַטאָר מינימום מאַכט
מאַקסימום DC עקסטינקשאַן פאַרהעלטעניש
אין דעם עקספּערימענט, זענען קיין RF סיגנאַלן נישט געווען אַפּליצירט צום סיסטעם. ריין גלייכשטראָם עקסטינסיטאָן איז געמאָסטן געוואָרן.
1. פיגור 5 ווייזט די אפּטישע מאַכט פון מאָדולאַטאָר אַרויסגאַנג, ווען מאָדולאַטאָר קאָנטראָלירט ביי שפּיץ פּונקט. עס ווייזט 3.71dBm אין דער דיאַגראַמע.
2. פיגור 6 ווייזט די אפּטישע מאַכט פון מאָדולאַטאָר אַרויסגאַנג, ווען דער מאָדולאַטאָר איז קאָנטראָלירט ביי נול פונקט. עס ווייזט -46.73dBm אין דער דיאַגראַמע. אין פאַקטישן עקספּערימענט, ווערייִרט דער ווערט אַרום -47dBm; און -46.73 איז אַ סטאַביל ווערט.
3. דעריבער, די סטאַבילע גלייכשטראָם אויסשלאָג פאַרהעלטעניש געמאָסטן איז 50.4dB.
באדערפענישן פֿאַר הויך עקסטינדזשמענט פאַרהעלטעניש
1. סיסטעם מאָדולאַטאָר מוז האָבן אַ הויכן עקסטינדזשמענט פאַרהעלטעניש. די כאַראַקטעריסטיק פון סיסטעם מאָדולאַטאָר באַשטימט די מאַקסימום עקסטינדזשמענט פאַרהעלטעניש וואָס קען דערגרייכט ווערן.
2. מען זאָל זיך אפגעבן מיט דער פּאָלאַריזאַציע פון מאָדולאַטאָר אינפוט ליכט. מאָדולאַטאָרן זענען סענסיטיוו צו פּאָלאַריזאַציע. געהעריקע פּאָלאַריזאַציע קען פֿאַרבעסערן דעם עקסטינדזשמענט פאַרהעלטעניש איבער 10dB. אין לאַבאָראַטאָריע עקספּערימענטן איז געוויינטלעך נויטיק אַ פּאָלאַריזאַציע קאָנטראָללער.
3. געהעריגע בייאַס קאָנטראָולערס. אין אונדזער DC עקסטערדזשעקשאַן פאַרהעלטעניש עקספּערימענט, איז 50.4dB עקסטערדזשעקשאַן פאַרהעלטעניש דערגרייכט געוואָרן. כאָטש די דאַטאַשיט פון די מאָדולאַטאָר פאַבריקאַנט ליסטעד בלויז 40dB. די סיבה פון דעם פֿאַרבעסערונג איז אַז עטלעכע מאָדולאַטאָרן דריפט זייער שנעל. ראָפעאַ R-BC-ANY בייאַס קאָנטראָולערס דערהייַנטיקן די בייאַס וואָולטידזש יעדע 1 סעקונדע צו ענשור אַ שנעלע רעאַקציע.
ספּעציפֿיקאַציעס
| פּאַראַמעטער | מין | טיפּ | מאַקס | איינהייט | באדינגונגען |
| קאָנטראָל פאָרשטעלונג | |||||
| אויסשטאַרבן פאַרהעלטעניש | מער 1 | 50 | dB | ||
| סי-עס-אָ2 | −55 | −65 | −70 | דבּק | דיטער אַמפּליטוד: 2%Vπ |
| סטאַביליזאַציע צייט | 4 | s | טראַקינג פונקטן: נול און שפּיץ | ||
| 10 | טראַקינג פונקטן: Q+ און Q- | ||||
| עלעקטריש | |||||
| פּאָזיטיווע מאַכט וואָולטידזש | +14.5 | +15 | +15.5 | V | |
| פּאָזיטיווער מאַכט קראַנט | 20 | 30 | mA | ||
| נעגאַטיווע מאַכט וואָולטידזש | -15.5 | -15 | -14.5 | V | |
| נעגאַטיווער מאַכט קראַנט | 2 | 4 | mA | ||
| אַרויסגאַנג וואָולטידזש קייט | -9.57 | +9.85 | V | ||
| אַרויסגאַנג וואָולטידזש פּינקטלעכקייט | 346 | µV | |||
| דיטער פרעקווענץ | 999.95 | טויזנט | 1000.05 | Hz | ווערסיע: 1kHz דיטער סיגנאַל |
| דיטער אַמפּליטוד | 0.1%Vπ | V | טראַקינג פונקטן: נול און שפּיץ | ||
| 2%Vπ | טראַקינג פונקטן: Q+ און Q- | ||||
| אָפּטיש | |||||
| אײַנגאַנג אָפּטישע מאַכט3 | -30 | -5 | דבם | ||
| אינפוט כוואַליע | 780 | 2000 | nm | ||
1. MER באציט זיך צו מאדולאטאר עקסטינקשאַן ראַטיאָ. די עקסטינקשאַן ראַטיאָ וואָס ווערט דערגרייכט איז טיפּיש די עקסטינקשאַן ראַטיאָ פון מאדולאטאר ספּעציפֿיצירט אין די מאדולאטאר דאַטאַבלאַט.
2. CSO באציט זיך צו קאמפאזיט צווייטע ארדענונג. כדי צו מעסטן CSO ריכטיג, מוז מען זיכער מאכן אז די לינעארע קוואַליטעט פון RF סיגנאַל, מאָדולאַטאָרן און ריסיווערס. דערצו, די סיסטעם CSO לייענונגען קענען זיין אַנדערש ווען זיי לויפן ביי פאַרשידענע RF פרעקווענצן.
3. ביטע באַמערקט אַז די אפּטישע מאַכט וואָס ווערט אַרייַנגעגעבן שטימט נישט איבער מיט דער אפּטישער מאַכט ביים אויסגעקליבענעם בייאַס פּונקט. דאָס באַציט זיך צו דער מאַקסימום אפּטישער מאַכט וואָס דער מאָדולאַטאָר קען עקספּאָרטירן צום קאָנטראָללער ווען דער בייאַס וואָולטידזש איז צווישן −Vπ און +Vπ.
באַניצער צובינד
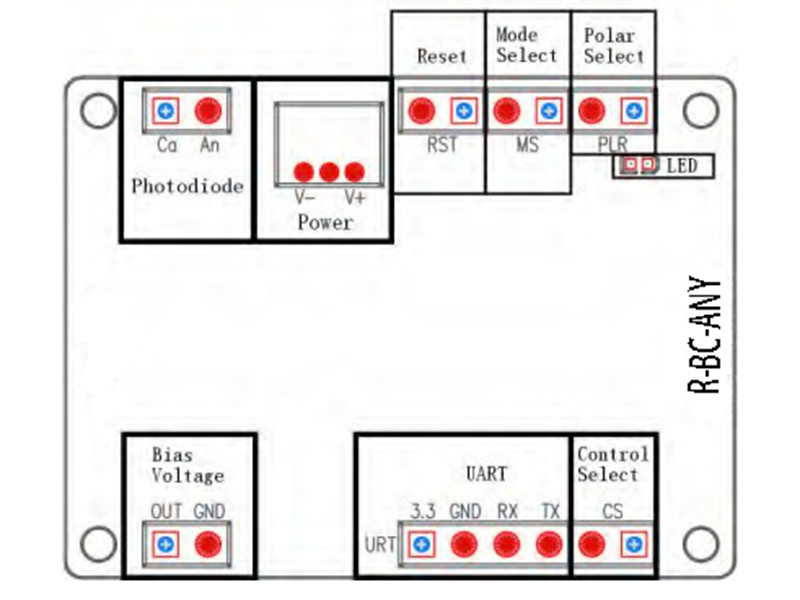
פיגור 5. פֿאַרזאַמלונג
| גרופּע | אָפּעראַציע | דערקלערונג |
| פאָטאָדיאָד 1 | פּד: פֿאַרבינדן די קאַטאָדע פֿון MZM פֿאָטאָדיאָדן | געבן פאָטאָקראַנט באַמערקונגען |
| GND: פֿאַרבינדן MZM פֿאָטאָדיאָוד'ס אַנאָוד | ||
| מאַכט | מאַכט מקור פֿאַר בייאַס קאָנטראָללער | V-: פֿאַרבינדט דעם נעגאַטיוון עלעקטראָד |
| V+: פֿאַרבינדט דעם פּאָזיטיוון עלעקטראָד | ||
| מיטלערע פּראָבע: פֿאַרבינדט די ערד עלעקטראָד | ||
| צוריקשטעלן | אַרײַנשטעלן דעם דזשאַמפּער און אַרויסציען נאָך 1 סעקונדע | צוריקשטעלן דעם קאָנטראָללער |
| מאָדע אויסקלייבן | אַרײַנשטעלן אָדער אַרויסציען דעם דזשאַמפּער | קיין דזשאַמפּער: נול מאָדע; מיט דזשאַמפּער: קוואַד מאָדע |
| פּאָלאַר סעלעקט 2 | אַרײַנשטעלן אָדער אַרויסציען דעם דזשאַמפּער | קיין דזשאַמפּער: פּאָזיטיוו פּאָלאַר; מיט דזשאַמפּער: נעגאַטיוו פּאָלאַר |
| בייאַס וואָולטידזש | פאַרבינדן מיט די MZM בייאַס וואָולטידזש פּאָרט | OUT און GND צושטעלן בייאַס וואָולטידזשעס פֿאַר מאָדולאַטאָר |
| לעד | קאָנסטאַנט אויף | ארבעטן אונטער א סטאבילן שטאַט |
| אן-אויס אדער אויס-אן יעדע 0.2 סעקונדעס | פּראַסעסינג דאַטן און זוכן פֿאַר קאָנטראָל פּונקטן | |
| אן-אויס אדער אויס-אן יעדע 1 סעקונדעס | די אפּטישער מאַכט פון די אַרייַנגאַנג איז צו שוואַך | |
| אן-אויס אדער אויס-אן יעדע 3 סעקונדעס | די אפּטישער מאַכט פון די אַרייַנגאַנג איז צו שטאַרק | |
| יוארט | אָפּערירן קאָנטראָללער דורך UART | 3.3: 3.3V רעפערענץ וואָולטאַזש |
| GND: ערד | ||
| RX: באַקומען פון קאָנטראָללער | ||
| TX: טראַנסמיסיע פון קאָנטראָללער | ||
| קאָנטראָל סעלעקט | אַרײַנשטעלן אָדער אַרויסציען דעם דזשאַמפּער | קיין דזשאַמפּער: דזשאַמפּער קאָנטראָל; מיט דזשאַמפּער: UART קאָנטראָל |
1. עטלעכע MZ מאָדולאַטאָרן האָבן אינעווייניקסטע פאָטאָדיאָדן. מען זאָל אויסקלײַבן דעם קאָנטראָללער'ס פאָטאָדיאָד אָדער דעם מאָדולאַטאָר'ס אינעווייניקסטע פאָטאָדיאָד. עס איז רעקאָמענדירט צו נוצן דעם קאָנטראָללער'ס פאָטאָדיאָד פֿאַר לאַבאָראַטאָריע עקספּערימענטן פֿאַר צוויי סיבות. ערשטנס, די קאָנטראָללער'ס פאָטאָדיאָד האָט געראַנטירט קוואַליטעט. צווייטנס, עס איז גרינגער צו סטרויערן די אינטענסיטעט פֿון די אינפוט ליכט. באַמערקונג: אויב איר ניצט דעם מאָדולאַטאָר'ס אינעווייניקסטע פאָטאָדיאָד, זאָרגט אַז דער אַרויסגאַנג קראַנט פֿון דער פאָטאָדיאָד איז שטרענג פּראָפּאָרציאָנעל צו דער אינפוט מאַכט.
2. פּאָלאַר פּין ווערט גענוצט צו באַשטימען דעם קאָנטראָל פּונקט צווישן שפּיץ און נול אין נול קאָנטראָל מאָדע (באַשטימט דורך מאָדע סעלעקט פּין) אָדער קוואַד+
און קוואַד- אין קוואַד קאָנטראָל מאָדע. אויב דער דזשאַמפּער פון פּאָלאַר פּין איז נישט אַרייַנגעשטעלט, וועט דער קאָנטראָל פּונקט זיין נול אין נול מאָדע אָדער קוואַד+ אין קוואַד מאָדע. די אַמפּליטוד פון RF סיסטעם וועט אויך אַפעקטירן דעם קאָנטראָל פּונקט. ווען עס איז נישטאָ קיין RF סיגנאַל אָדער די RF סיגנאַל אַמפּליטוד איז קליין, קען דער קאָנטראָללער פֿאַרשפּאַרן דעם אַרבעט פּונקט צום ריכטיקן פּונקט ווי אויסגעקליבן דורך MS און PLR דזשאַמפּער. ווען די RF סיגנאַל אַמפּליטוד יקסידז אַ געוויסן שוועל, וועט דער פּאָלאַר פון סיסטעם ווערן געביטן, אין דעם פאַל, זאָל דער PLR כעאַדער זיין אין דעם פאַרקערטן צושטאַנד, ד.ה. דער דזשאַמפּער זאָל ווערן אַרייַנגעשטעלט אויב נישט, אָדער אַרויסגעצויגן אויב ער איז אַרייַנגעשטעלט.
טיפּישע אַפּליקאַציע
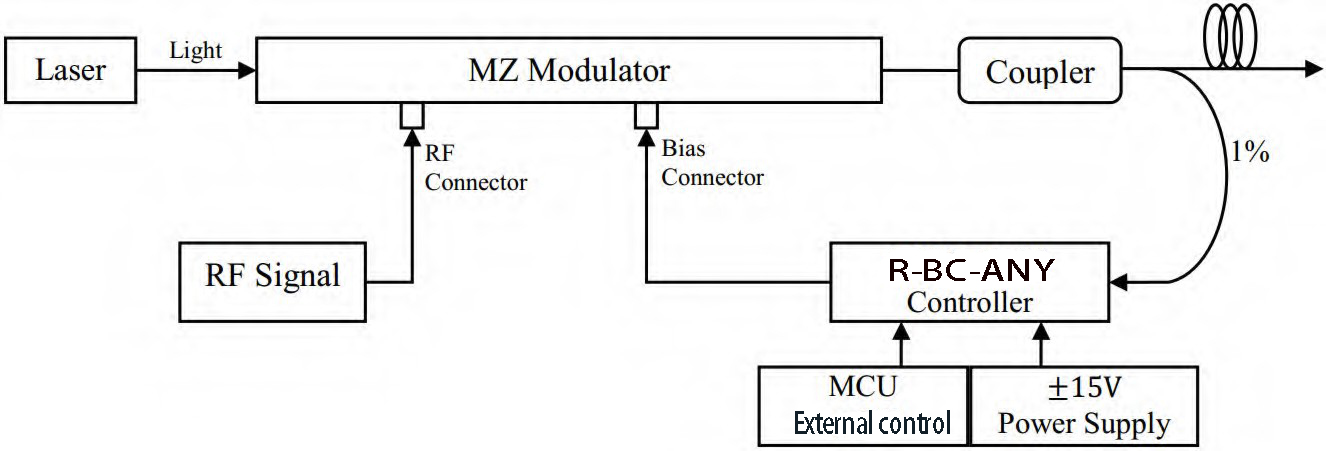
דער קאָנטראָללער איז גרינג צו ניצן.
שריט 1. פֿאַרבינדט דעם 1% פּאָרט פֿון דעם קאַפּלער צום פֿאָטאָדיאָוד פֿון דעם קאָנטראָללער.
שריט 2. פארבינדט די בייאַס וואָולטידזש אַוטפּוט פון די קאָנטראָללער (דורך SMA אָדער 2.54 מם 2-פּין כעאַדער) צו די בייאַס פּאָרט פון די מאָדולאַטאָר.
שריט 3. צושטעלן קאנטראלער מיט +15V און -15V גלייכשטראָם וואָולטידזש.
שריט 4. איבערשטעלן דעם קאנטראלער און עס וועט אנהייבן ארבעטן.
באַמערקונג. ביטע זייט זיכער אַז דער RF סיגנאַל פֿון דער גאַנצער סיסטעם איז אָן איידער איר ריסעט דעם קאָנטראָללער.
ראָפעאַ אָפּטאָעלעקטראָניקס אָפפערט אַ פּראָדוקט ליניע פון קאמערציעלע עלעקטראָ-אָפּטישע מאָדולאַטאָרן, פאַזע מאָדולאַטאָרן, אינטענסיטעט מאָדולאַטאָר, פאָטאָדעטעקטאָרן, לאַזער ליכט קוואלן, DFB לאַזערס, אָפּטישע אַמפּליפייערז, EDFA, SLD לאַזער, QPSK מאָדולאַציע, פּולס לאַזער, ליכט דעטעקטאָר, באַלאַנסט פאָטאָדעטעקטאָר, לאַזער דרייווער, פיבער אָפּטיש אַמפּליפייער, אָפּטישער מאַכט מעטער, ברייטבאַנד לאַזער, טונאַבאַל לאַזער, אָפּטישער דעטעקטאָר, לאַזער דיאָד דרייווער, פיבער אַמפּליפייער. מיר אויך צושטעלן פילע באַזונדערע מאָדולאַטאָרן פֿאַר קאַסטאַמייזיישאַן, אַזאַ ווי 1*4 אַרעי פאַזע מאָדולאַטאָרן, אולטראַ-נידעריק Vpi, און אולטראַ-הויך עקסטינקטיאָן פאַרהעלטעניש מאָדולאַטאָרן, בפֿרט געניצט אין אוניווערסיטעטן און אינסטיטוטן.
מיר האָפן אַז אונדזערע פּראָדוקטן וועלן זיין נוצלעך פֿאַר אײַך און אײַער פֿאָרשונג.


