




דיזיין פוןפאָטאָנישאינטעגרירטע קרייז
פאָטאָנישע אינטעגרירטע קרייזן(PIC) ווערן אָפט דיזיינט מיט דער הילף פון מאַטעמאַטישע סקריפּטן צוליב דער וויכטיקייט פון וועג לענג אין אינטערפעראָמעטערס אָדער אַנדערע אַפּליקאַציעס וואָס זענען סענסיטיוו צו וועג לענג.בילדווערט פאבריצירט דורך פּאַטערן קייפל שיכטן (געווענליך 10 ביז 30) אויף א וועיפער, וואָס זענען צוזאמענגעשטעלט פון פילע פּאָליגאָנאַלע שאַפּעס, אָפט רעפּרעזענטירט אין די GDSII פֿאָרמאַט. איידער מען שיקט די טעקע צום פאָטאָמאַסקע פאַבריקאַנט, איז עס שטאַרק ווינשעוודיק צו קענען סימולירן די PIC צו וועריפיצירן די ריכטיקייט פון די פּלאַן. די סימולאַציע איז צעטיילט אין קייפל לעוועלס: דער נידעריגסטער לעוועל איז די דריי-דימענסיאָנאַלע עלעקטראָמאַגנעטישע (EM) סימולאַציע, וואו די סימולאַציע ווערט דורכגעפירט אויף דער סוב-וועוולענגט לעוועל, כאָטש די אינטעראַקציעס צווישן אַטאָמען אין דעם מאַטעריאַל ווערן געהאַנדלט אויף דער מאַקראָסקאָפּישער וואָג. טיפּישע מעטאָדן אַרייַננעמען דריי-דימענסיאָנאַלע ענדלעך-דיפערענס צייט-דאָמעין (3D FDTD) און אייגענמאָד עקספּאַנשאַן (EME). די מעטאָדן זענען די מערסט פּינקטלעך, אָבער זענען נישט פּראַקטיש פֿאַר די גאנצע PIC סימולאַציע צייט. דער ווייַטער לעוועל איז 2.5-דימענסיאָנאַלע EM סימולאַציע, אַזאַ ווי ענדלעך-דיפערענס שטראַל פּראָפּאַגיישאַן (FD-BPM). די מעטאָדן זענען פיל שנעלער, אָבער אָפּפֿערן עטלעכע פּינקטלעכקייט און קענען בלויז שעפּן פּאַראַקסיאַל פּראָפּאַגיישאַן און קענען נישט ווערן געניצט צו סימולירן רעזאָנאַטאָרן, למשל. דער נעקסטער שטאפל איז 2D EM סימולאציע, ווי למשל 2D FDTD און 2D BPM. די זענען אויך שנעלער, אבער האבן באגרענעצטע פונקציאנאליטעט, ווי למשל זיי קענען נישט סימולירן פאלאריזאציע ראטאטארן. א ווייטערדיגער שטאפל איז טראנסמיסיע און/אדער סקאַטערינג מאטריץ סימולאציע. יעדער הויפט קאמפאנענט ווערט רעדוצירט צו א קאמפאנענט מיט אינפוט און אויטפוט, און דער פארבונדענער וועיווגייד ווערט רעדוצירט צו א פאזע שיפט און אטענואאציע עלעמענט. די סימולאציעס זענען גאר שנעל. דער אויטפוט סיגנאל ווערט באקומען דורך פארמערן די טראנסמיסיע מאטריץ מיטן אינפוט סיגנאל. די סקאַטערינג מאטריץ (וועמענס עלעמענטן ווערן גערופן S-פאראמעטערס) פארמערט די אינפוט און אויטפוט סיגנאלן אויף איין זייט צו געפינען די אינפוט און אויטפוט סיגנאלן אויף דער אנדערער זייט פון דעם קאמפאנענט. באזיקלי, די סקאַטערינג מאטריץ אנטהאלט די רעפלעקציע אינעווייניג דעם עלעמענט. די סקאַטערינג מאטריץ איז געווענליך צוויי מאל אזוי גרויס ווי די טראנסמיסיע מאטריץ אין יעדער דימענסיע. אין קורצן, פון 3D EM ביז טראנסמיסיע/סקאַטערינג מאטריץ סימולאציע, יעדער שיכט פון סימולאציע פרעזענטירט א קאמפראמיס צווישן שנעלקייט און גענויקייט, און דיזיינערס קלייבן דעם ריכטיגן שטאפל פון סימולאציע פאר זייערע ספעציפישע באדערפענישן צו אפטימיזירן דעם דיזיין וואלידאציע פראצעס.
אבער, זיך פארלאזן אויף עלעקטראמאגנעטישע סימולאציע פון געוויסע עלעמענטן און ניצן א צעשפרייטונג/טראנספער מאטריץ צו סימולירן דעם גאנצן PIC גאראנטירט נישט א גאנץ ריכטיגן דיזיין פארנט פון דער פלוס טעלער. למשל, אומרעכטע אויסרעכענונגען פון וועג לענג, מולטימאדע וועיווגיידס וואס קענען נישט עפעקטיוו אונטערדריקן הויך-ארדענונג מאָדעס, אדער צוויי וועיווגיידס וואס זענען צו נאנט איינער צום אנדערן וואס פירן צו אומגעריכטע קאפלונג פראבלעמען וועלן מסתמא נישט ווערן באמערקט בעת דער סימולאציע. דעריבער, כאטש פארגעשריטענע סימולאציע מכשירים צושטעלן שטארקע דיזיין וואלידאציע מעגלעכקייטן, פארלאנגט עס נאך אלץ א הויכן גראד פון וואכזאמקייט און פארזיכטיקע דורכקוק דורך דעם דיזיינער, צוזאמען מיט פראקטישע עקספיריענס און טעכנישע וויסן, צו פארזיכערן די גענויקייט און פארלעסלעכקייט פון דעם דיזיין און רעדוצירן דעם ריזיקע פון דעם פלוס שיט.
א טעכניק גערופן "שפּאָרע FDTD" ערלויבט 3D און 2D FDTD סימולאַציעס צו ווערן דורכגעפירט גלייך אויף א גאַנצן PIC פּלאַן צו וואַלידירן דעם פּלאַן. כאָטש עס איז שווער פֿאַר יעדן עלעקטראָמאַגנעטישן סימולאַציע געצייַג צו סימולירן אַ זייער גרויסן PIC, איז דער "שפּאָרע FDTD" ביכולת צו סימולירן אַ גאַנץ גרויסן לאָקאַלן געגנט. אין טראַדיציאָנעלן 3D FDTD, הייבט זיך די סימולאַציע אָן מיטן איניציאַליזירן די זעקס קאָמפּאָנענטן פון דעם עלעקטראָמאַגנעטישן פעלד אין אַ ספּעציפֿישן קוואַנטיזירטן וואָלומען. ווי די צייט גייט פאָרויס, ווערט דער נייער פעלד קאָמפּאָנענט אין דעם וואָלומען אויסגערעכנט, און אַזוי ווייטער. יעדער שריט דאַרף אַ סך אויסרעכענונגען, אַזוי עס נעמט אַ לאַנגע צייט. אין "שפּאָרע 3D FDTD", אַנשטאָט אויסרעכענען ביי יעדן שריט ביי יעדן פּונקט פון דעם וואָלומען, ווערט אַ רשימה פון פעלד קאָמפּאָנענטן געהאַלטן וואָס קענען טעאָרעטיש קאָרעספּאָנדירן צו אַן אַרביטרער גרויסן וואָלומען און ווערן אויסגערעכנט נאָר פֿאַר יענע קאָמפּאָנענטן. ביי יעדן צייט שריט, ווערן פּונקטן וואָס זענען שכנותדיק צו פעלד קאָמפּאָנענטן צוגעגעבן, בשעת פעלד קאָמפּאָנענטן אונטער אַ געוויסן מאַכט שוועל ווערן אַרויסגעלאָזט. פֿאַר עטלעכע סטרוקטורן, קען די אויסרעכענונג זיין עטלעכע אָרדערס פון מאַגניטוד שנעלער ווי טראַדיציאָנעלן 3D FDTD. אבער, דין FDTDS ארבעטן נישט גוט ווען מען האנדלט מיט דיספּערסיווע סטרוקטורן ווייל דאס צייט פעלד פארשפרייט זיך צו שטארק, וואס רעזולטירט אין ליסטעס וואס זענען צו לאנג און שווער צו פירן. פיגור 1 ווייזט א ביישפיל סקרינשאט פון א 3D FDTD סימולאציע ענלעך צו א פאלאריזאציע שטראל ספּליטער (PBS).
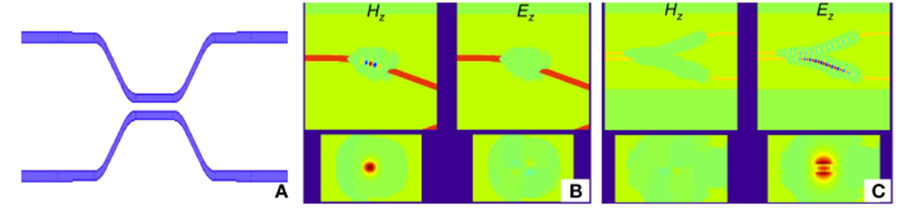
פיגור 1: סימולאציע רעזולטאטן פון 3D דין FDTD. (א) איז א אויבערשטער בליק פון דער סטרוקטור וואס ווערט סימולירט, וואס איז א דירעקשאנעל קאפלער. (ב) ווייזט א סקרינשאט פון א סימולאציע ניצנדיג קוואזי-TE עקסייטאציע. די צוויי דיאגראמען אויבן ווייזן די אויבערשטע בליק פון די קוואזי-TE און קוואזי-TM סיגנאלן, און די צוויי דיאגראמען אונטן ווייזן די קארעספאנדירנדע קראָס-סעקשאַנאַל בליק. (ג) ווייזט א סקרינשאט פון א סימולאציע ניצנדיג קוואזי-TM עקסייטאציע.
פּאָסט צייט: 23סטן יולי 2024