




הינטער קאָמפּאַקט יק מאָדולאַטאָר פאָרורטייל קאָנטראָללער אָטאַמאַטיק פאָרורטייל קאָנטראָללער


שטריך
• פּראָווידעס דריי בייאַסיז פֿאַר IQ מאָדולאַטאָרס ינדיפּענדאַנטלי מאָדולאַטיאָן פֿאָרמאַט:
• QPSK, QAM, OFDM, SSB וועראַפייד
• צאַפּן און שפּיל:
ניט מאַנואַל קאַלאַבריישאַן דארף אַלץ אָטאַמאַטיק
• איך, ק געווער: קאָנטראָל אויף שפּיץ און נול מאָדעס הויך יקסטינגשאַן פאַרהעלטעניש: 50dB max1
• פּ אָרעם: קאָנטראָל אויף ק + און ק- מאָדעס אַקיעראַסי: ± 2◦
• נידעריק פּראָפיל: 40 מם (וו) × 28 מם (ד) × 8 מם (ה)
• הויך פעסטקייַט: גאָר דיגיטאַל ימפּלאַמענטיישאַן גרינג צו נוצן:
• מאַנואַל אָפּעראַציע מיט מיני דזשאַמפּער פלעקסאַבאַל אָעם אַפּעריישאַנז דורך UART2
•צוויי מאָדעס צו צושטעלן פאָרורטייל וואָולטידזש: אַ. אָטאַמאַטיק פאָרורטייל קאָנטראָל ב. באַניצער דיפיינד פאָרורטייל וואָולטידזש
אַפּפּליקאַטיאָן
•LiNbO3 און אנדערע יקמאָדולאַטאָרס
• QPSK, QAM, OFDM, SSB און עטק
• קאָוכיראַנט טראַנסמיסיע
פאָרשטעלונג
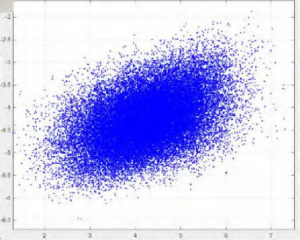
פיגורע 1. געשטערן (אָן קאָנטראָללער)
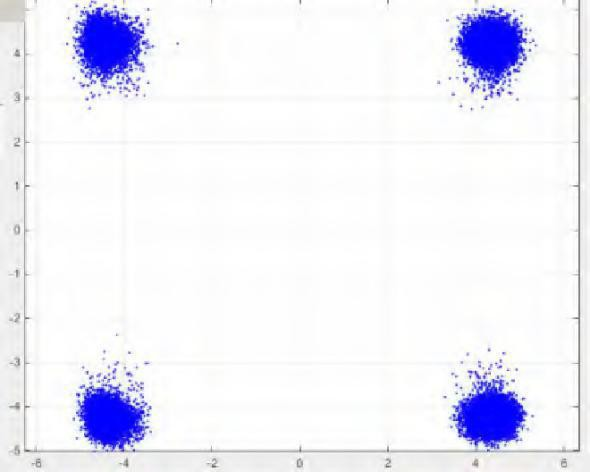
פיגורע 2. QPSK Constellation (מיט קאָנטראָללער
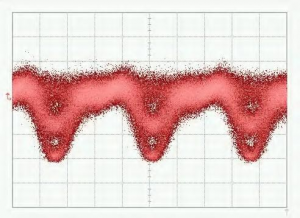
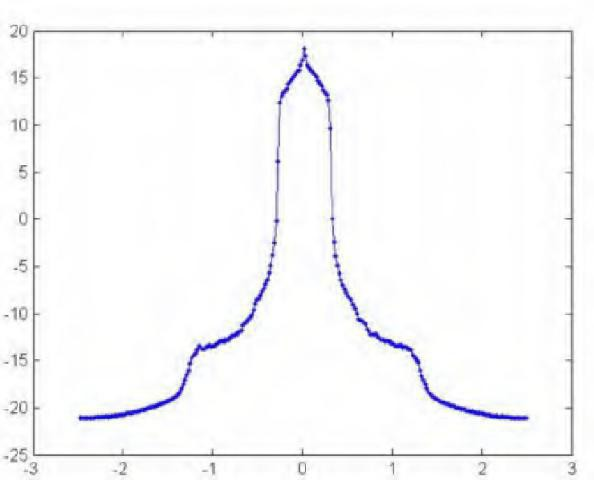
פיגורע 3. QPSK-Eye מוסטער
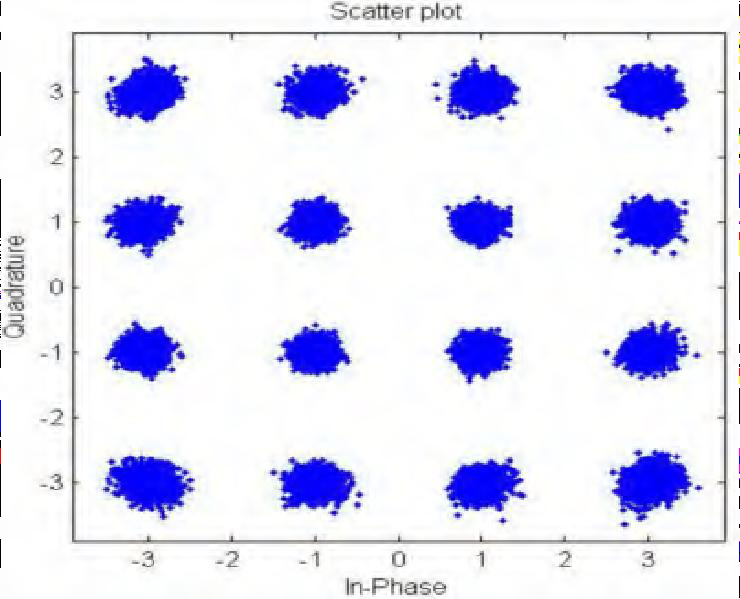
פיגורע 5. 16-QAM קאָנסטעלאַטיאָן מוסטער
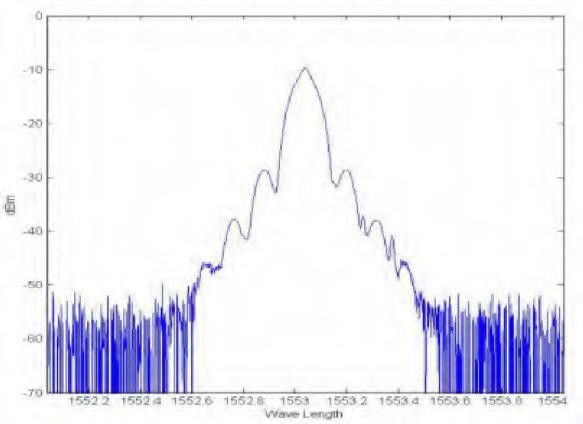
פיגורע 4. קפּסק ספּעקטרום
פיגורע 6. 16-QAM ספּעקטרום
ספּעסאַפאַקיישאַנז
| פּאַראַמעטער | מין | טיפּ | מאַקס | אַפּאַראַט |
| קאָנטראָל פאָרשטעלונג | ||||
| איך, ק געווער זענען קאַנטראָולד אויףנול (מינימום) אָדערשפּיץ (מאַקסימום) פּונקט | ||||
| יקסטינגשאַן פאַרהעלטעניש | MER1 | 50 | dB | |
| פּ אָרעם איז קאַנטראָולד אויףק + (רעכט קוואַדראַט) אָדערק-( לינקס קוואַדראַט) פּונקט | ||||
| אַקיעראַסי אין קוואַד | -2 | +2 | גראַד2 | |
| סטאַביליזאַטיאָן צייט | 15 | 20 | 25 | s |
| עלעקטריקאַל | ||||
| positive מאַכט וואָולטידזש | +14.5 | +15 | +15.5 | V |
| positive מאַכט קראַנט | 20 | 30 | mA | |
| נעגאַטיוו מאַכט וואָולטידזש | -15.5 | -15 | -14.5 | V |
| נעגאַטיוו מאַכט קראַנט | 8 | 15 | mA | |
| רעזולטאַט וואָולטידזש קייט | -14.5 | +14.5 | V | |
| דיטער אַמפּליטוד | 1%Vπ | V | ||
| אָפּטיש | ||||
| אַרייַנשרייַב אָפּטיש מאַכט3 | -30 | -8 | dBm | |
| אַרייַנשרייַב ווייוולענגט | 1100 | 1650 | nm | |
1. MER רעפערס צו מאָדולאַטאָר עקסטינקטיאָן פאַרהעלטעניש.די יקסטינגשאַן פאַרהעלטעניש אַטשיווד איז טיפּיקלי די יקסטינגשאַן פאַרהעלטעניש פון מאָדולאַטאָר ספּעסיפיעד אין מאָדולאַטאָר דאַטאַשיט.
2. ביטע זיין אנגעוויזן אַז אַרייַנשרייַב אָפּטיש מאַכט טוט נישט שטימען צו די אָפּטיש מאַכט אין אויסגעקליבן פאָרורטייל פונט.עס רעפערס צו די מאַקסימום אָפּטיש מאַכט אַז די מאָדולאַטאָר קענען אַרויספירן צו קאָנטראָללער ווען פאָרורטייל וואָולטידזש ריינדזשאַז פון -Vπ צו +Vπ.
באַניצער צובינד
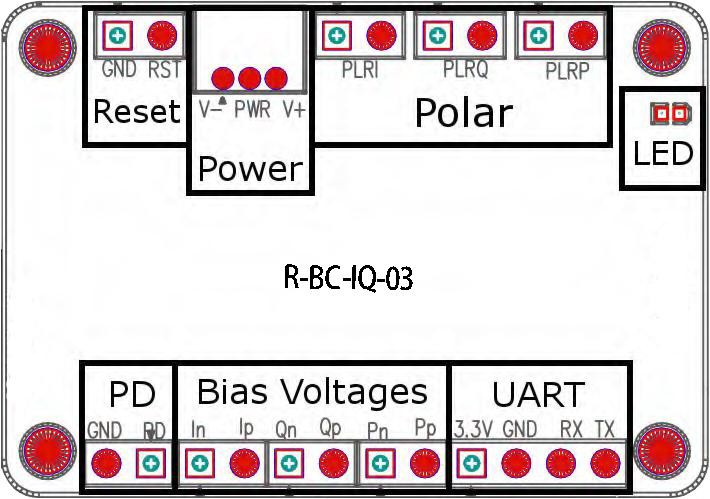
פיגור 5.פֿאַרזאַמלונג
| גרופע | אָפּעראַציע | דערקלערונג |
| באַשטעטיק | אַרייַנלייגן דזשאַמפּער און ציען אויס נאָך 1 רגע | באַשטעטיק די קאָנטראָללער |
| קראַפט | מאַכט מקור פֿאַר פאָרורטייל קאָנטראָללער | V- קאַנעקץ די נעגאַטיוו ילעקטראָוד פון די מאַכט צושטעלן |
| V+ קאַנעקץ די positive ילעקטראָוד פון די מאַכט צושטעלן | ||
| מיטל פּאָרט קאַנעקץ מיט די ערד ילעקטראָוד | ||
| פּאָליאַר1 | PLRI: אַרייַנלייגן אָדער ציען אויס די דזשאַמפּער | קיין דזשאַמפּער: נול מאָדע;מיט דזשאַמפּער: שפּיץ מאָדע |
| PLRQ: אַרייַנלייגן אָדער ציען אויס די דזשאַמפּער | קיין דזשאַמפּער: נול מאָדע;מיט דזשאַמפּער: שפּיץ מאָדע | |
| PLRP: אַרייַנלייגן אָדער ציען אויס די דזשאַמפּער | קיין דזשאַמפּער: ק + מאָדע;מיט דזשאַמפּער: ק- מאָדע | |
| געפֿירט | קעסיידער אויף | ארבעטן אונטער סטאַביל שטאַט |
| אויף-אַוועק אָדער אַוועק-אויף יעדער 0.2 ס | פּראַסעסינג דאַטן און זוכן פֿאַר קאַנטראָולינג פונט | |
| אויף-אַוועק אָדער אַוועק-אויף יעדער 1 ס | אַרייַנשרייַב אָפּטיש מאַכט איז אויך שוואַך | |
| אויף-אַוועק אָדער אַוועק-אויף יעדער 3 ס | אַרייַנשרייַב אָפּטיש מאַכט איז אויך שטאַרק | |
| פּד2 | פאַרבינדן מיט די פאָטאָדיאָדע | פּד פּאָרט קאַנעקץ די קאַטאָוד פון די פאָטאָדיאָדע |
| GND פּאָרט קאַנעקץ די אַנאָוד פון די פאָטאָדיאָדע | ||
| פאָרורטייל וואָולטידזשיז | אין, IP: פאָרורטייל וואָולטידזש פֿאַר די אָרעם | IP: positive זייַט;אין: נעגאַטיוו זייַט אָדער ערד |
| Qn, Qp: פאָרורטייל וואָולטידזש פֿאַר Q אָרעם | קפּ: positive זייַט;קן: נעגאַטיוו זייַט אָדער ערד | |
| Pn, Pp: פאָרורטייל וואָולטידזש פֿאַר P אָרעם | פּפּ: positive זייַט;פּן: נעגאַטיוו זייַט אָדער ערד | |
| UART | אַרבעטן די קאָנטראָללער דורך UART | 3.3: 3.3 וו רעפֿערענץ וואָולטידזש |
| GND: ערד | ||
| RX: באַקומען קאָנטראָללער | ||
| טקס: טראַנסמיט פון קאָנטראָללער |
1 פּאָליאַר דעפּענדס אויף סיסטעם רף סיגנאַל.ווען עס איז קיין רף סיגנאַל אין די סיסטעם, די פּאָליאַר זאָל זיין positive.ווען RF סיגנאַל האט אַ אַמפּליטוד גרעסער ווי אַ זיכער מדרגה, די פּאָליאַר וועט טוישן פון positive אין נעגאַטיוו.אין דעם צייט, נול פונט און שפּיץ פונט וועט באַשטימען מיט יעדער אנדערע. Q + פונט און Q- פונט וועט באַשטימען מיט יעדער אנדערע ווי געזונט. פּאָליאַר באַשטימען ינייבאַלז באַניצער צו טוישן די פּאָליאַר
גלייַך אָן טשאַנגינג אָפּעראַציע ווייזט.
2בלויז איין ברירה וועט זיין אויסדערוויילט צווישן ניצן קאַנטראָולער פאָטאָדיאָדע אָדער ניצן מאָדולאַטאָר פאָטאָדיאָדע.עס איז רעקאַמענדיד צו נוצן קאָנטראָללער פאָטאָדיאָדע פֿאַר לאַב יקספּעראַמאַנץ פֿאַר צוויי סיבות.פירסטלי, קאָנטראָללער פאָטאָדיאָדע האט ינשורד קוואַלאַטיז.צווייטנס, עס איז גרינגער צו סטרויערן די אַרייַנשרייַב ליכט ינטענסיטי.
ראָפעאַ אָפּטאָעלעקטראָניקס אָפפערס אַ פּראָדוקט ליניע פון געשעפט עלעקטראָ-אָפּטיק מאָדולאַטאָרס, פאַסע מאָדולאַטאָרס, ינטענסיטי מאָדולאַטאָר, פאָטאָדעטעקטאָרס, לאַזער ליכט קוואלן, דפב לייזערז, אָפּטיש אַמפּלאַפייערז, עדפאַ, סלד לאַזער, QPSK מאַדזשאַליישאַן, דויפעק לאַזער, ליכט דיטעקטער, באַלאַנסט פאָטאָדעטעקטאָר, לייזער דרייווער. , פיברע אַפּטיק אַמפּלאַפייער, אָפּטיש מאַכט מעטער, בראָדבאַנד לאַזער, טונאַבלע לאַזער, אָפּטיש דעטעקטאָר, לאַזער דייאָוד שאָפער, פיברע אַמפּליפיער.מיר אויך צושטעלן פילע באַזונדער מאָדולאַטאָרס פֿאַר קוסטאָמיזאַטיאָן, אַזאַ ווי 1 * 4 מענגע פאַסע מאָדולאַטאָרס, הינטער-נידעריק ופּי און הינטער-הויך יקסטינגשאַן פאַרהעלטעניש מאָדולאַטאָרס, בפֿרט געניצט אין אוניווערסיטעטן און אינסטיטוציעס.
האָפענונג אונדזער פּראָדוקטן וועט זיין נוציק פֿאַר איר און דיין פאָרשונג.

