




הינטער הויך פּרעסיסיאָן MZM פאָרורטייל קאָנטראָללער אָטאַמאַטיק פאָרורטייל קאָנטראָללער


שטריך
• פאָרורטייל וואָולטידזש קאָנטראָל אויף שפּיץ / נול / ק + / ק -
• פאָרורטייל וואָולטידזש קאָנטראָל אויף אַרביטראַריש פונט
• הינטער גענוי קאָנטראָל: 50dB מאַקסימום יקסטינגשאַן פאַרהעלטעניש אויף נול מאָדע;
±0.5◦ אַקיעראַסי אויף Q+ און Q− מאָדעס
• נידעריק דיטער אַמפּליטוד:
0.1% Vπ אין NULL מאָדע און פּיק מאָדע
2% Vπ אין Q+ מאָדע און Q− מאָדע
• הויך פעסטקייַט: מיט גאָר דיגיטאַל ימפּלאַמענטיישאַן
• נידעריק פּראָפיל: 40 מם (וו) × 30 מם (ד) × 10 מם (ה)
• גרינג צו נוצן: מאַנואַל אָפּעראַציע מיט מיני דזשאַמפּער;
פלעקסאַבאַל אָעם אַפּעריישאַנז דורך MCU UART2
• צוויי פאַרשידענע מאָדעס צו צושטעלן פאָרורטייל וואָולטידזש: אַ.אָטאַמאַטיק פאָרורטייל קאָנטראָל
ב.באַניצער דיפיינד פאָרורטייל וואָולטידזש

אַפּפּליקאַטיאָן
• LiNbO3 און אנדערע MZ מאָדולאַטאָרס
• דיגיטאַל NRZ, RZ
• דויפעק אַפּלאַקיישאַנז
• בריללאָוין צעוואָרפן סיסטעם און אנדערע אָפּטיש סענסאָרס
• קאַטוו טראַנסמיטער
פאָרשטעלונג
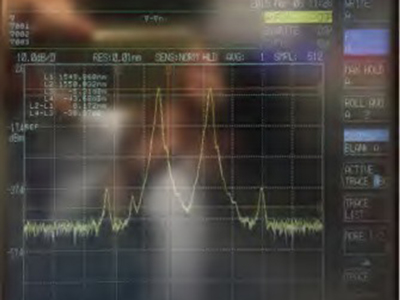
פיגורע 1. קאַריער סאַפּרעשאַן
פיגורע 2. דויפעק גענעראַטיאָן

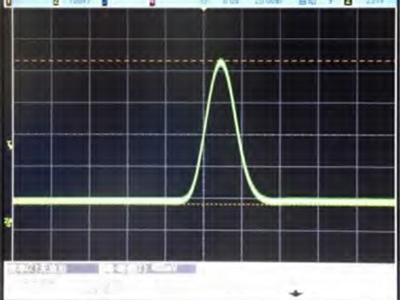
פיגורע 3. מאָדולאַטאָר מאַקס מאַכט
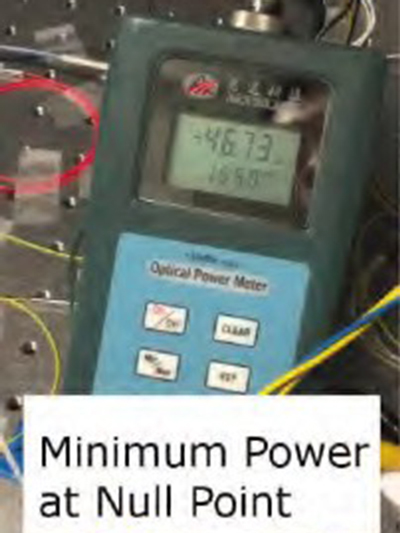
פיגורע 4. מאָדולאַטאָר מינימום מאַכט
מאַקסים דק יקסטינגשאַן פאַרהעלטעניש
אין דעם עקספּערימענט, קיין רף סיגנאַלז זענען געווענדט צו די סיסטעם.ריין דק עקסטינסיטאָן איז געמאסטן.
1. פיגורע 5 דעמאַנסטרייץ די אָפּטיש מאַכט פון מאַדזשאַלאַטאָר רעזולטאַט, ווען מאָדולאַטאָר קאַנטראָולד בייַ שפּיץ פונט.עס ווייזט 3.71 דבם אין די דיאַגראַמע.
2. פיגורע 6 ווייזט די אָפּטיש מאַכט פון מאָדולאַטאָר רעזולטאַט, ווען די מאָדולאַטאָר קאַנטראָולד בייַ נאַל פונט.עס ווייזט -46.73dBm אין די דיאַגראַמע.אין פאַקטיש עקספּערימענט, די ווערט וועריז אַרום -47דבם;און -46.73 איז אַ סטאַביל ווערט.
3. דעריבער, די סטאַביל דק יקסטינגשאַן פאַרהעלטעניש געמאסטן איז 50.4דב.
רעקווירעמענץ פֿאַר הויך יקסטינגשאַן פאַרהעלטעניש
1. סיסטעם מאָדולאַטאָר מוזן האָבן אַ הויך יקסטינגשאַן פאַרהעלטעניש.כאַראַקטעריסטיש פון סיסטעם מאָדולאַטאָר דיסיידז די מאַקסימום יקסטינגשאַן פאַרהעלטעניש קענען זיין אַטשיווד.
2. די פּאָלאַריזאַטיאָן פון די אַרייַנשרייַב ליכט פון די מאָדולאַטאָר זאָל זיין גענומען.מאָדולאַטאָרס זענען שפּירעוודיק צו פּאָולעראַזיישאַן.געהעריק פּאָולעראַזיישאַן קענען פֿאַרבעסערן יקסטינגשאַן פאַרהעלטעניש איבער 10dB.אין לאַב יקספּעראַמאַנץ, יוזשאַוואַלי אַ פּאָולעראַזיישאַן קאָנטראָללער איז דארף.
3. געהעריק פאָרורטייל קאַנטראָולערז.אין אונדזער דק יקסטינגשאַן פאַרהעלטעניש עקספּערימענט, 50.4dB יקסטינגשאַן פאַרהעלטעניש איז אַטשיווד.בשעת די דאַטאַשיט פון די מאַדולאַטאָר פּראָדוצירן בלויז 40 דב.די סיבה פון דעם פֿאַרבעסערונג איז אַז עטלעכע מאָדולאַטאָרס דריפט זייער שנעל.Rofea R-BC-ANY פאָרורטייל קאַנטראָולערז דערהייַנטיקן די פאָרורטייל וואָולטידזש יעדער 1 רגע צו ענשור שנעל שפּור ענטפער.
ספּעסאַפאַקיישאַנז
| פּאַראַמעטער | מין | טיפּ | מאַקס | אַפּאַראַט | באדינגונגען |
| קאָנטראָל פּערפאָרמאַנסע | |||||
| יקסטינגשאַן פאַרהעלטעניש | MER 1 | 50 | dB | ||
| CSO2 | -55 | -65 | -70 | dBc | דיטער אַמפּליטוד: 2% ווπ |
| סטאַביליזאַטיאָן צייט | 4 | s | טראַקינג פונקטן: נול & פּיק | ||
| 10 | טראַקינג פונקטן: Q+ & Q- | ||||
| עלעקטריקאַל | |||||
| positive מאַכט וואָולטידזש | +14.5 | +15 | +15.5 | V | |
| positive מאַכט קראַנט | 20 | 30 | mA | ||
| נעגאַטיוו מאַכט וואָולטידזש | -15.5 | -15 | -14.5 | V | |
| נעגאַטיוו מאַכט קראַנט | 2 | 4 | mA | ||
| רעזולטאַט וואָולטידזש קייט | -9.57 | +9.85 | V | ||
| רעזולטאַט וואָולטידזש פּינטלעכקייַט | 346 | µV | |||
| דיטער אָפטקייַט | 999.95 | 1000 | 1000.05 | Hz | ווערסיע: 1kHz דיטער סיגנאַל |
| דיטער אַמפּליטוד | 0.1% Vπ | V | טראַקינג פונקטן: נול & פּיק | ||
| 2% Vπ | טראַקינג פונקטן: Q+ & Q- | ||||
| אָפּטיש | |||||
| אַרייַנשרייַב אָפּטיש מאַכט3 | -30 | -5 | dBm | ||
| אַרייַנשרייַב ווייוולענגט | 780 | 2000 | nm | ||
1. MER רעפערס צו מאָדולאַטאָר עקסטינקטיאָן פאַרהעלטעניש.די יקסטינגשאַן פאַרהעלטעניש אַטשיווד איז טיפּיקלי די יקסטינגשאַן פאַרהעלטעניש פון מאָדולאַטאָר ספּעסיפיעד אין מאָדולאַטאָר דאַטאַשיט.
2. CSO רעפערס צו קאָמפּאָסיטע רגע סדר.צו מעסטן CSO ריכטיק, די לינעאַר קוואַליטעט פון רף סיגנאַל, מאָדולאַטאָרס און ראַסיווערז וועט זיין ינשורד.אין אַדישאַן, די CSO רידינגז פון די סיסטעם קען בייַטן ווען פליסנדיק אין פאַרשידענע רף פריקוואַנסיז.
3. ביטע זיין אנגעוויזן אַז אַרייַנשרייַב אָפּטיש מאַכט טוט נישט שטימען צו די אָפּטיש מאַכט אין אויסגעקליבן פאָרורטייל פונט.עס רעפערס צו די מאַקסימום אָפּטיש מאַכט אַז די מאָדולאַטאָר קענען אַרויספירן צו קאָנטראָללער ווען פאָרורטייל וואָולטידזש ריינדזשאַז פון -Vπ צו +Vπ.
באַניצער צובינד
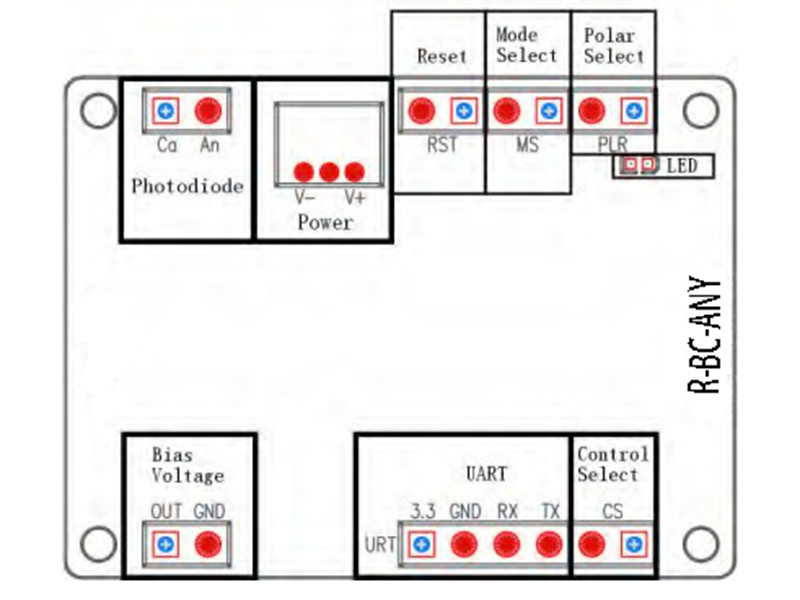
פיגור 5.פֿאַרזאַמלונג
| גרופע | אָפּעראַציע | דערקלערונג |
| פאָטאָדיאָדע 1 | פּד: פאַרבינדן די קאַטאָוד פון MZM פאָטאָדיאָדע | צושטעלן Photocurrent באַמערקונגען |
| GND: קאָננעקט די אַנאָדע פון MZM Photodiode | ||
| קראַפט | מאַכט מקור פֿאַר פאָרורטייל קאָנטראָללער | V-: קאַנעקץ די נעגאַטיוו ילעקטראָוד |
| V+: קאַנעקץ די positive ילעקטראָוד | ||
| מיטל זאָנד: קאַנעקץ די ערד ילעקטראָוד | ||
| באַשטעטיק | אַרייַנלייגן דזשאַמפּער און ציען אויס נאָך 1 רגע | באַשטעטיק די קאָנטראָללער |
| מאָדע אויסקלייַבן | אַרייַנלייגן אָדער ציען אויס די דזשאַמפּער | קיין דזשאַמפּער: נול מאָדע;מיט דזשאַמפּער: קוואַד מאָדע |
| פּאָליאַר סעלעקט2 | אַרייַנלייגן אָדער ציען אויס די דזשאַמפּער | קיין דזשאַמפּער: positive פּאָליאַר;מיט דזשאַמפּער: נעגאַטיוו פּאָלאַר |
| פאָרורטייל וואָולטידזש | פאַרבינדן מיט די MZM פאָרורטייל וואָולטידזש פּאָרט | OUT און GND צושטעלן פאָרורטייל וואָולטאַדזשאַז פֿאַר מאָדולאַטאָר |
| געפֿירט | קעסיידער אויף | ארבעטן אונטער סטאַביל שטאַט |
| אויף-אַוועק אָדער אַוועק-אויף יעדער 0.2 ס | פּראַסעסינג דאַטן און זוכן פֿאַר קאַנטראָולינג פונט | |
| אויף-אַוועק אָדער אַוועק-אויף יעדער 1 ס | אַרייַנשרייַב אָפּטיש מאַכט איז אויך שוואַך | |
| אויף-אַוועק אָדער אַוועק-אויף יעדער 3 ס | אַרייַנשרייַב אָפּטיש מאַכט איז אויך שטאַרק | |
| UART | אַרבעטן די קאָנטראָללער דורך UART | 3.3: 3.3 וו רעפֿערענץ וואָולטידזש |
| GND: ערד | ||
| RX: באַקומען קאָנטראָללער | ||
| טקס: טראַנסמיט פון קאָנטראָללער | ||
| קאָנטראָל אויסקלייַבן | אַרייַנלייגן אָדער ציען אויס די דזשאַמפּער | קיין דזשאַמפּער: דזשאַמפּער קאָנטראָל; מיט דזשאַמפּער: UART קאָנטראָל |
1. עטלעכע MZ מאָדולאַטאָרס האָבן ינערלעך פאָטאָדיאָדעס.קאַנטראָולער סעטאַפּ זאָל זיין אויסדערוויילט צווישן ניצן די פאָטאָדיאָדע קאָנטראָללער אָדער די ינערלעך פאָטאָדיאָדע פון די מאָדולאַטאָר.עס איז רעקאַמענדיד צו נוצן די פאָטאָדיאָדע קאָנטראָללער פֿאַר לאַב יקספּעראַמאַנץ פֿאַר צוויי סיבות.פירסטלי, קאָנטראָללער פאָטאָדיאָדע האט ינשורד קוואַליטעט.צווייטנס, עס איז גרינגער צו סטרויערן די אַרייַנשרייַב ליכט ינטענסיטי.באַמערקונג: אויב איר נוצן די ינערלעך פאָטאָדיאָדע פון די מאָדולאַטאָר, ביטע מאַכן זיכער אַז דער רעזולטאַט קראַנט פון פאָטאָדיאָוד איז שטרענג פּראַפּאָרשאַנאַל צו די אַרייַנשרייַב מאַכט.
2. פּאָליאַר שטיפט איז געניצט צו באַשטימען די קאָנטראָל פונט צווישן פּיק און נאַל אין נול קאָנטראָל מאָדע (באשלאסן דורך מאָדע סעלעקט שטיפט) אָדער קוואַד +
און קוואַד-אין קוואַד קאָנטראָל מאָדע.אויב דזשאַמפּער פון פּאָליאַר שטיפט איז נישט ינסערטאַד, די קאָנטראָל פונט וועט זיין נאַל אין נאַל מאָדע אָדער קוואַד + אין קוואַד מאָדע.אַמפּליטוד פון רף סיסטעם וועט אויך ווירקן די קאָנטראָל פונט.ווען עס איז קיין רף סיגנאַל אָדער רף סיגנאַל אַמפּליטוד איז קליין, קאָנטראָללער איז ביכולת צו שלאָס די אַרבעט פונט צו ריכטיק פונט ווי סעלעקטעד דורך MS און PLR דזשאַמפּער.ווען די רף סיגנאַל אַמפּליטוד יקסידז זיכער שוועל, די פּאָליאַר פון די סיסטעם וועט זיין געביטן, אין דעם פאַל, די PLR כעדער זאָל זיין אין די פאַרקערט שטאַט, ד"ה די דזשאַמפּער זאָל זיין ינסערטאַד אויב עס איז נישט אָדער פּולד אויס אויב עס איז ינסערטאַד.
טיפּיש אַפּלאַקיישאַן
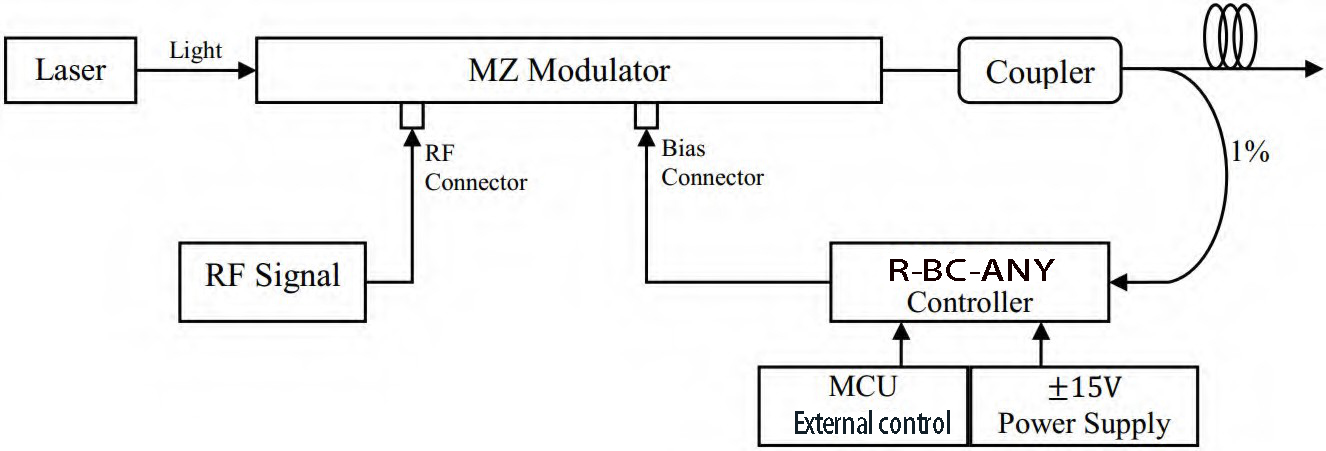
די קאָנטראָללער איז גרינג צו נוצן.
שריט 1.פאַרבינדן 1% פּאָרט פון די קאַפּלער צו די פאָטאָדיאָדע פון די קאָנטראָללער.
סטעפּ2.פאַרבינדן פאָרורטייל וואָולטידזש רעזולטאַט פון די קאָנטראָללער (דורך SMA אָדער 2.54 מם 2-שפּילקע כעדער) צו פאָרורטייל פּאָרט פון די מאָדולאַטאָר.
סטעפּ3.צושטעלן קאָנטראָללער מיט +15V און -15V DC וואָולטידזש.
שריט 4.באַשטעטיק די קאָנטראָללער און עס וועט אָנהייבן צו אַרבעטן.
נאטיץ.ביטע זיין ינשורד אַז רף סיגנאַל פון די גאנצע סיסטעם איז אויף איידער באַשטעטיק די קאָנטראָללער.
ראָפעאַ אָפּטאָעלעקטראָניקס אָפפערס אַ פּראָדוקט ליניע פון געשעפט עלעקטראָ-אָפּטיק מאָדולאַטאָרס, פאַסע מאָדולאַטאָרס, ינטענסיטי מאָדולאַטאָר, פאָטאָדעטעקטאָרס, לאַזער ליכט קוואלן, דפב לייזערז, אָפּטיש אַמפּלאַפייערז, עדפאַ, סלד לאַזער, QPSK מאַדזשאַליישאַן, דויפעק לאַזער, ליכט דיטעקטער, באַלאַנסט פאָטאָדעטעקטאָר, לייזער דרייווער. , פיברע אַפּטיק אַמפּלאַפייער, אָפּטיש מאַכט מעטער, בראָדבאַנד לאַזער, טונאַבלע לאַזער, אָפּטיש דעטעקטאָר, לאַזער דייאָוד שאָפער, פיברע אַמפּליפיער.מיר אויך צושטעלן פילע באַזונדער מאָדולאַטאָרס פֿאַר קוסטאָמיזאַטיאָן, אַזאַ ווי 1 * 4 מענגע פאַסע מאָדולאַטאָרס, הינטער-נידעריק ופּי און הינטער-הויך יקסטינגשאַן פאַרהעלטעניש מאָדולאַטאָרס, בפֿרט געניצט אין אוניווערסיטעטן און אינסטיטוציעס.
האָפענונג אונדזער פּראָדוקטן וועט זיין נוציק פֿאַר איר און דיין פאָרשונג.

